
Mediante la fusión de varios sensores de alta precisión, el Laboratorio Ishikawa-Komuro de la universidad de Tokyo desarroya varios experimentos realmente sorprendentes.

Concepto
Las interacciones en el mundo real (No sólo las físicas si no también las interacciones sociales y psicológicas) son un fenómeno inherentemente paralelo. Construyendo modelos y sistemas de ingeniería que pueden tener en cuenta estos paralelismos, uno puede esperar un mejor entendimiento del mundo real de los sistemas con aplicaciones prácticas. Estas consideraciones fundamentales nos permite concentrar en procesos pararelos la información sensorial. Cuatro tópicos base estan siendo explorados en el laboratorio Ishikawa-komuro:
- Teoria de fusión de sensores e implementación en sistemas de ingeniería.
- Control dinamico de la imagen basada en proceso de de información visual de alta velocidad.
- Procesamiento paralelo masivo de imagenes a traves de un chip de visión, capaz de realizar tareas a alta velocidad con visión en tiempo real.
- Meta percepción, manipulando y presentando la información que normalmente es inaccesible para humanos y máquinas.
Mano robótica de alta velocidad y precisión.
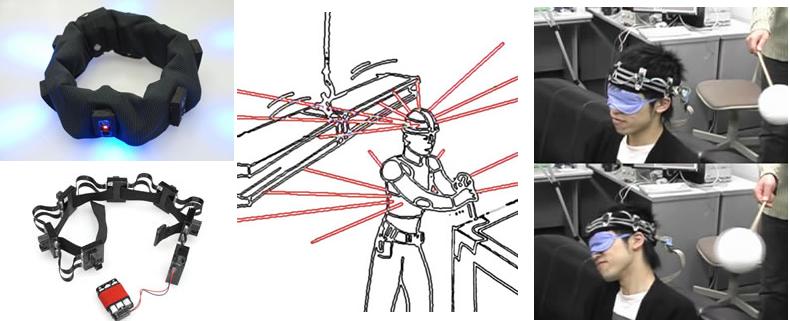
Haptic Radar (sensor de percepción "extrasensorial")
El Haptic Radar permite a la persona sentir objetos en el espacio entorno a el y esquivarlo sin verlo.
Escaner a 1000 fps.


0 COMENTARIOS:
Publicar un comentario
Tu opinión nos importa.